News

Xishuangbanna, China – December 26-29, 2025 – The four-day 2025 International Conference on Bio-inspired Systems and Robotics (ICBSR 2025) successfully concluded in Xishuangbanna. As a flagship international academic conference in the interdisciplinary fields of bionics, control, and robotics, this year's event brought together nearly 200 experts, scholars, and engineers from universities, research institutions, and industries worldwide. Centered on the theme "From Biomimetics to Integration," participants shared the latest research findings and engaged in lively discussions on the future development direction of intelligent systems.



The conference officially commenced on December 27. The opening ceremony was presided over by Professor Jiande Wu from Yunnan University, the General Co-Chair of the conference. Opening addresses were delivered by Professor Habin Duan from Beihang University, General Chair and Professor Jing Na from the Yunnan Association of Automation, General Co-Chair. Following the concise yet solemn opening speeches, all attendees gathered for a group photo, capturing this precious moment for the international academic community.
The keynote speech sessions of the conference brought together leading scholars in the fields of bionics and robotics from both China and abroad, featuring eight high-level academic presentations that outlined a complete innovation map from fundamental theory to cutting-edge applications. The keynote sessions were jointly chaired by Professor Quanbo Ge from Nanjing University of Information Science and Technology, Professor Hao Liu from the Shenyang Institute of Automation, Chinese Academy of Sciences, Professor Bin Li from Sichuan University, and Professor Jing Xu from Tsinghua University.

Professor Zengguang Hou from the Institute of Automation, Chinese Academy of Sciences, delivered a presentation titled “Human-Machine Interaction: Methods and Challenges for Rehabilitation Robots,” offering an in-depth analysis of the challenges and methodologies in human-robot interaction for rehabilitation robots.

Professor Liangqing Liu from Shenyang Institute of Automation, Chinese Academy of Sciences, China presented on “From Biomimetics to Biosyncretics: Robots Based on Integration of Living Systems and Electromechanical Systems,” proposing a new paradigm of robotic development that shifts from biomimicry to the integration of living and electromechanical systems.

Professor Zhendong Dai from Nanjing University of Aeronautics and Astronautics gave a talk titled “Measuring 6D Reaction Forces in Humanoid Robot: From Human Locomotion Dynamics to the Performance of Humanoid Robot,” sharing profound insights from human locomotion dynamics to the performance measurement of humanoid robots.
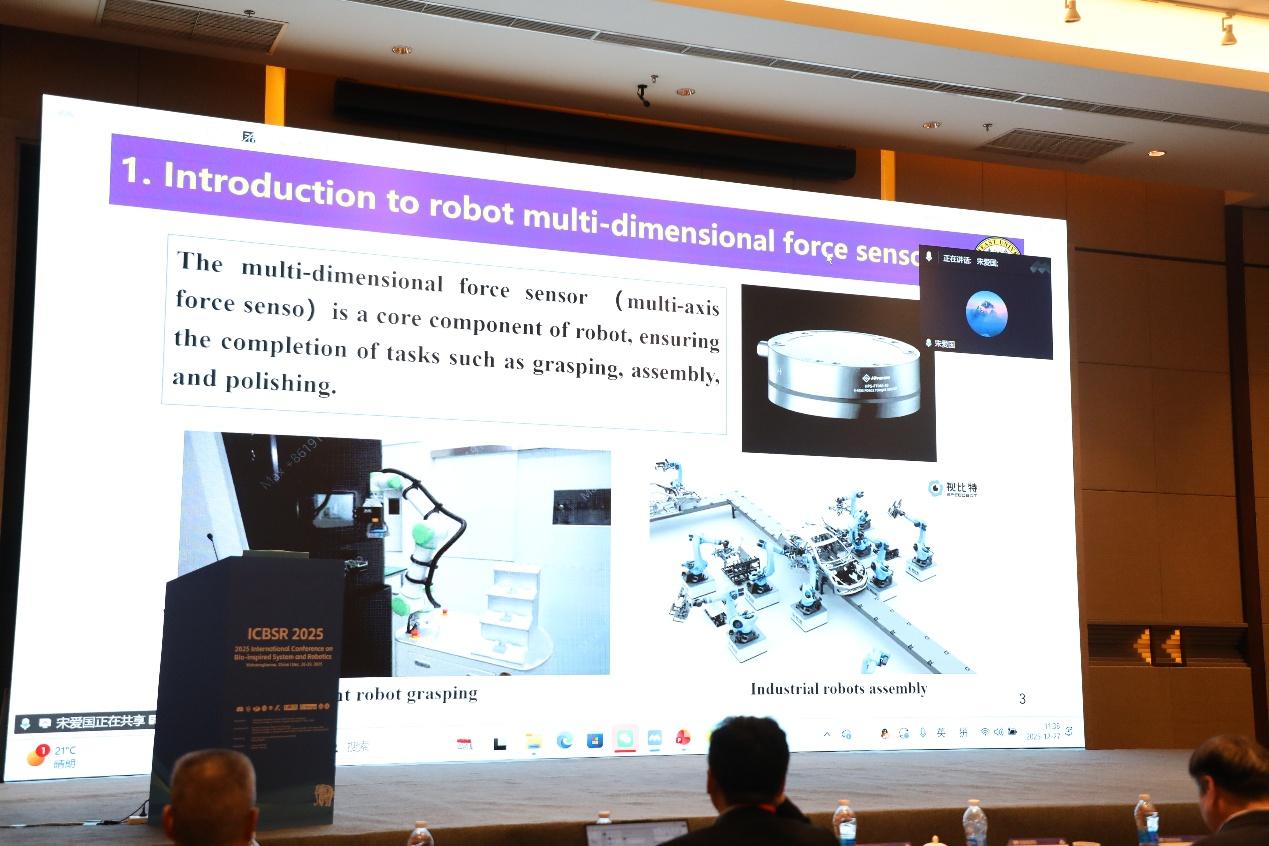
Professor Aiguo Song from Southeast University presented on “Multi-dimensional Force Sensor for Robot,” focusing on the technology of multi-dimensional force sensors for robotic applications.

Professor Huawei Chen from Beihang University delivered a presentation titled “Magnetically Actuated Micro-robot: Non-invasive Approach for Precision Medicine,” showcasing magnetically driven micro-robot technology for precise, non-invasive medical applications.

Professor Jing Na from Kunming University of Science and Technology presented on “High Precision Motion Control for Nonlinear Robotics with Unknown Dynamics,” introducing a high-precision motion control method for nonlinear robotic systems with unknown dynamics.

Professor Huayan Pu from Chongqing University gave a talk titled “Programmable Passive Continuous Mechanical Computation with Multistable Mechanisms,” exploring programmable passive continuous mechanical computation based on multistable mechanisms.

Professor Hui Zhang from Hunan University presented on “Multimodal Intelligent Perception Technology and Applications of UAVs in Complex Power Scenarios,” introducing multimodal intelligent perception technology and its applications for UAVs in complex power scenarios.
On December 28th, the meeting entered an intensive parallel communication session. Eight technical sub venues conducted in-depth discussions on sub themes such as "New Developments in Robotics", "Biomimetic System Control", "Biomimetic Unmanned Systems", and "Information Processing". The two poster display sessions held at the same time provided valuable opportunities for young scholars and graduate students to showcase themselves. During this period, participants had ample one-on-one exchanges around the posters, sparking many collaborative sparks.
The conference successfully established an efficient platform for academic and industrial exchange. Attendees widely agreed that the event not only presented the most cutting-edge scientific achievements in the field of bio-inspired systems and robotics but also fostered the integration of ideas and project collaboration intentions across disciplines, institutions, and even national borders. During the conference, many preliminary ideas for cooperation began to take shape, laying a solid foundation for subsequent joint research, technology transfer, and industrial applications.
With the successful conclusion of ICBSR 2025, the conference has officially announced the commencement of the next edition. The organizing committee warmly invites colleagues from around the globe to gather in Xiamen, China, from December 25 to 28, 2026, to continue working together to advance innovation in bio-inspired systems and robotics technology, contributing wisdom and strength to solving global challenges and creating a better, smarter future.
